
A ABB Robótica e o Instituto de Pesquisa Neurológica Jan e Dan Duncan (Duncan NRI) do Texas Children’s Hospital, um dos maiores hospitais pediátricos dos EUA, fizeram um avanço médico inovador ao criar uma estação de trabalho automatizada de transferência de Drosophila melanogaster (mosca-das-frutas), com o robô colaborativo YuMi® da ABB, para ajudar no estudo de doenças como Alzheimer, Huntington e Parkinson.
Essa é a primeira solução de automação que não exige que as moscas sejam imobilizadas com anestésicos, como o dióxido de carbono, antes da transferência, uma etapa tediosa em soluções de automação anteriores, que pode afetar negativamente o comportamento das moscas e, potencialmente, a precisão dos resultados do estudo.
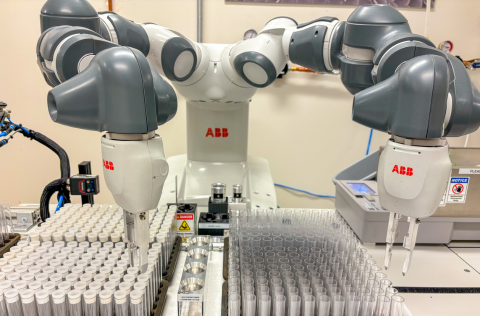
O cobot YuMi da ABB executa os mesmos movimentos que os pesquisadores humanos para tocar e transferir as moscas entre os frascos, permitindo que os cientistas se concentrem em tarefas de missão crítica, como a descoberta de novos caminhos e o teste da eficácia de novos medicamentos no tratamento de distúrbios neurológicos. Isso elimina a necessidade de anestesiar as moscas antes da transferência, aumentando a precisão dos resultados e agilizando o processo.
“Temos visto avanços significativos na automação de laboratórios ao longo dos anos, mas algumas tarefas cruciais ainda são realizadas manualmente, o que pode afetar os resultados”, disse Jose-Manuel Collados, gerente de Produtos de Robótica da Linha Service da ABB”. Os braços do nosso cobot YuMi trabalham independentemente, mas de forma coordenada, tornando possível automatizar a complexa tarefa de transferir moscas vivas entre frascos.”
A Drosophila melanogaster, comumente conhecida como mosca-das-frutas, está bem estabelecida no estudo de vários aspectos da biologia, incluindo genética, desenvolvimento e comportamento. A mosca-das-frutas compartilha muitos marcadores genéticos e de desenvolvimento com os seres humanos e é usada em estudos sobre doenças neurológicas humanas em todo o mundo.
Como parte da manutenção de rotina, os pesquisadores alimentam as moscas-das-frutas transferindo-as para frascos contendo alimentos frescos a cada 30 dias. Um laboratório típico mantém cerca de 20.000 frascos e os pesquisadores gastam cerca de 20% de um dia de trabalho “virando as moscas”, colocando um frasco contendo o estoque de moscas sobre um frasco com alimento fresco e batendo nele para soltar as moscas. Todas as tentativas de automatizar o processo até o momento envolveram a exposição das moscas fora dos frascos durante a transferência, exigindo, portanto, sedação.
Os engenheiros da ABB Robótica colaboraram com os pesquisadores do Duncan NRI para projetar e construir uma estação de trabalho de transferência de moscas, que inclui o cobot YuMi, uma mesa empilhada com frascos para transferência, uma unidade de código de barras e etiquetagem e uma calha de lixo.
“Essa solução inovadora para acelerar a pesquisa biomédica é o resultado de nossa estreita parceria de mais de dois anos com a ABB Robótica”, disse o Dr. Juan Botas, professor do Departamento de Genética Molecular e Humana e do Departamento de Biologia Molecular e Celular do Baylor College of Medicine e pesquisador principal do Duncan NRI. “Combinando a biologia da mosca-das-frutas e a experiência de alto rendimento dos pesquisadores do DNRI, liderados por mim e pelo Dr. Ismael-Al Ramahi, professor assistente do Baylor College of Medicine e também pesquisador do Duncan NRI, com a experiência em automação dos engenheiros da ABB, pudemos projetar uma solução baseada em cobot, que reduz o tempo, elimina a perda de tensão e permite que mais experimentos sejam realizados em paralelo.”
O YuMi lida com todo o processo de manuseio das moscas-das-frutas, realizando 10 etapas pré-programadas em rápida sucessão. Assim como os humanos, o YuMi pega um frasco contendo moscas vivas, abre a tampa protetora de acetato de celulose, coloca o frasco sobre outro com alimento fresco, bate nos frascos para transferir as moscas, tampa, rotula, escaneia e, finalmente, empilha o frasco em prateleiras de papelão. Em seguida, o robô descarta os frascos com o alimento antigo para evitar qualquer contaminação cruzada.
Um recurso técnico importante integrado à solução é a capacidade de ler códigos de barras e imprimir etiquetas, que são aplicadas aos frascos com informações sobre a cepa e o genótipo durante a transferência. Esse recurso garante o rastreamento e o gerenciamento meticulosos das cepas de Drosophila. As tecnologias de sensores avançados do robô permitem a colocação precisa dos frascos em suportes de papelão padrão, permitindo que os pesquisadores continuem usando os racks de frascos existentes, reduzindo os custos operacionais.
Mais importante ainda, esse robô foi projetado para ser cooperativo e seguro para a interação humana. Seus braços com sensor de movimento são equipados para detectar pessoas ou objetos próximos, interrompendo o movimento instantaneamente para evitar acidentes, permitindo assim um espaço de trabalho colaborativo seguro.